Новият експеримент за зареждане на гориво на НАСА (RRM) е революционно демонстрационно устройство за технология - приведено на разстояние от последната мисия на совалката - което ще изпробва и докаже дали съществуващите околоземни космически кораби, които никога не са били предназначени за обслужване, могат да бъдат успешно заредени и ремонтирани с робот.
RRM полезният товар е състояние на експеримента за намиране на пътека на изкуството, който обещава да отвори нови вълнуващи пътища за научноизследователска работа на станции, които потенциално биха могли да спестят и удължат живота на орбиталните търговски, правителствени и военни спътници, оценени на милиарди долари.
RRM беше доставен на Международната космическа станция (МКС) от четиричленния екипаж на STS-135, големия финал на совалките. Проектът е съвместно усилие между НАСА и Канадската космическа агенция (CSA).
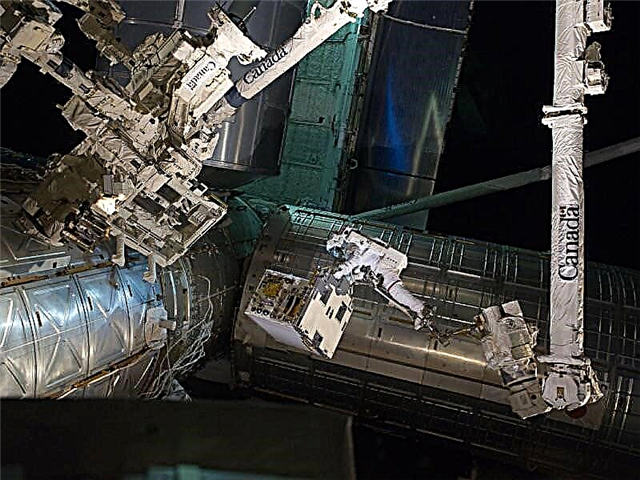
По време на последния космически пътека на ерата на космическите совалки, RRM беше временно инсталиран от американските астронавти Майк Фосум и Рон Гаран върху платформа на робота Dextre - Dexterous Manipulator със специална цел - който функционира като „майстор“ в космоса.
Dextre е два въоръжени робота, предоставени от CSA, който също е ключов компонент на експеримента, защото дава възможност за изпълнение на задачи за ремонт и поддръжка в основата на експеримента RRM.

Единицата с размер на пералнята тежи 500 килограма и беше прибрана в полето за полезен товар на Space Shuttle Atlantis и прикрепена към лекия многоцелеви превозвач (LMC) за еднопосочно пътуване в космоса.
След заминаването на Атлантида, RRM ще бъде прехвърлен в постоянна точка на прикрепване на тръбните станции и монтиран на външния логистичен превозвач 4 (ELC-4) на орбитата на орбита с милион лири.
RRM е първата по рода си демонстрация на НАСА, предназначена да тества осъществимостта на операциите по обслужване на орбитата на спътници, които не са били изградени, за да бъдат експлоатирани и поддържани след взрива в космоса, според Джъстин Касиди, мениджър на RRM за хардуер в NASA Goddard Spaceflight Център в Грийнбелт, Мериленд.
Полето RRM ще симулира както сателита, който трябва да се обслужва, така и техниките за поддръжка, необходими за извършване на роботизирани дейности по зареждане и ремонт.

"Роботът Dextre ще манипулира четири специално проектирани" Инструменти ", съхранявани в заливите вътре в RRM", каза Касиди в интервю в Космическия център в Кенеди.
Използвайки макет на RRM с висока вярност - по прякор Роузи - на показ в пресцентъра на космическия център Кенеди, Касиди ми говори подробно за мисията и целите на RRM.
Четирите уникални инструменти за RRM имат наследство в обслужващите мисии на Хъбъл и са разработени в НАСА Годдард; Инструментът за манипулиране на жици и одеяла, многофункционалният инструмент, инструмента за отстраняване на предпазна капачка и инструмента за дюзи.
„Dextre ще захване инструментите и ще ги премести с„ ръцете “, за да изпълнява задачи за зареждане и поддръжка на табла за дейности и симулирани сателитни компоненти, монтирани на външните стени на RRM“, каза ми Касиди. „Дъските за дейности могат да бъдат сменени в бъдеще, за да се проведат нови експерименти.“

Присвояването на RRM бележи първото използване на Dextre извън рутинните задачи за поддръжка на борда на МКС. Всъщност изследователският проект, работещ с RRM, всъщност е нова научноизследователска и развойна функция извън първоначално планираната и предвидена за Dextre, заяви Матьо Карон, мениджър на мисионните операции на CSA.
Задачите, планирани за RRM, включват работа върху и манипулиране на капачки, клапани и винтове с различни форми и размери, рязане на проводници, регулиране на термични одеяла и прехвърляне на течности около резервоари за гориво. Етанолът ще бъде използван за симулиране на потока на хидразин гориво, каза Касиди.
„RRM ще се управлява от контролери на земята в НАСА Годард, Центъра за космически полети„ Маршал “в Хънтсвил, Алания, а също и в Канада от Канадската космическа агенция“, обясни Касиди.
Всеки RRM инструмент е снабден с интегрални камери, в които са вградени шест вградени светодиоди, за да помогнат на наземните контролери точно да ръководят инструментите.
„Експерименталната фаза на RRM за демонстриране на роботизирани операции за зареждане и поддръжка на МКС е предвидена да продължи две години и може да продължи може би десет или повече години“, каза Касиди.
Президентът Обама попита екипажа на STS-135 за експеримента RRM по време на телефонно обаждане от Овалния офис от Белия дом до МКС. Гледайте телефонния разговор на Обама в YouTube
НАСА се надява, че малката инвестиция в демонстрацията на RRM технология ще проправи пътя за разширени последващи мисии и частно развитие на търговски роботизирани автомобили за зареждане и поддръжка - в не много далечното бъдеще - което ще пожъне милиарди долари икономия на разходи и дивиденти.





Прочетете характеристиките ми за мисията за последен трансфер, STS-135:
Водно оръдие поздравява тромпети възстановяване на бустери за твърди ракети на последния совал - Фотоалбум
Shuttle Atlantis Soars to Space One Последен път: Фотоалбум
Атлантида бе представена за исторически финален полет сред Бурно време
Отброяване до последния совал; Прогнозира се бурно време
Атлантис екипажът се придвижва във Флорида в деня на независимостта за финалния шатъл Blastoff
НАСА определя 8 юли за задължителен космически совал Grand Finale
Финалните шатъл-вояджъри провеждат отброяване на стартовата площадка във Флорида
Краен полезен товар за последен полет на совалка, доставен до стартовия панел
Последно пътуване досега до старта; Фото галерия
Атлантида върви вертикално за последен път
Atlantis се търкаля към сградата на монтажа на превозни средства с последен космически екипаж за 8 юли Blastoff