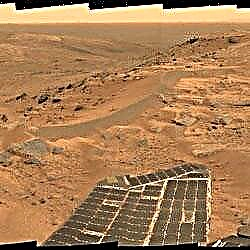
Духът е изглед към Марс. Кредит за изображение: НАСА / JPL. Щракнете за уголемяване
Дистанционните сензорни орбити, сонди, десанти и роувъри се връщат удивителни открития за нашата Слънчева система. Но някои от най-вълнуващите геоложки и потенциално астробиологични места в нашето семейство от планети и луни са опасни и трудни за изследване.
Университетът на Аризона, Калифорнийският технологичен институт и американските изследователи на геоложкото изследване на Flagstaff предлагат нова концепция за космическа мисия за намиране и проучване на най-важните научно важни повърхности и подпочвени повърхности в цялата Слънчева система.
Тези роботски мисии от ново поколение едновременно ще изследват отдалечени локации на няколко нива - от орбита, от въздуха и на земята - до дома по важни геология, хидрология, климат и вероятно астробиология в далечните светове, заяви Джеймс М. Дом от The Университета на Аризона. Дом, планетарен геолог в отдела за хидрология и водни ресурси на ОАЕ, е картографирал Марс в локални и глобални мащаби. Участва в автономни гребения на дълги разстояния, сензорна мрежа и орбитни експерименти с космически кораби.
Волфганг Финк, гостуващ сътрудник в Калтех, Дом и други, обсъждат новата концепция на мисията в статия „Роботни планетарни разузнавателни мисии от ново поколение: промяна на парадигмата“, която ще бъде публикувана в списанието на Планетарни и космически науки на Elsevier? : //www.elsevier.com/, отидете на Article in Press link). Те ръководиха екипните усилия, включващи Марк Тарбел, който е сътрудник на Финк в лабораторията за изследвания за визуални и автономни системи за изследване на Caltech; Трент Харе от американския офис за геоложки проучвания в Флагстаф; и Виктор Бейкър, регент на професорите от катедрите по хидрология и водни ресурси, планетарни науки и геоложки науки.
Новата концепция на мисията ще включва орбитални космически кораби, неравности и балони на планети или луни с достатъчно атмосфера, като Титан, и множество прости, подвижни мобилни и неподвижни наземни сензори. Тези космически, въздушни и наземни агенти ще бъдат програмирани да гледат интелигентно на околната среда и да си взаимодействат помежду си, предлагайки истинска "мащабируема" перспектива, необходима за научно мисията, каза Дом.
„Вече сме в оптимален прозорец във времето, когато космическите кораби и въздушните единици могат да се координират с наземни сензори, особено след като голяма част от технологиите вече са налични“, казва Финк, физик и експерт в системите за изображения, автономното управление и пространството системи за научен анализ на мисията „Дори технологията, която не е налична в момента - основно софтуерът, е доста постижима.“
? Важно е да гледате слоеве и слоеве от доказателства, а не само един тип ", каза Дом.
Например, каза Финк, роувър със софтуер за разпознаване на функции може да търси уникална скала, която би могла да съдържа критично парче от историята на Марс. "Ако добавите перспектива във въздуха, вие също виждате какво има от другата страна на хълма по едно и също време и също знаете точното местоположение на полето", каза той. Орбитът има глобалната картина на случващото се и командва въздушните и наземните нива под него.
Орбитърът в мисия с мащабируеми нива е оборудван с актуална информация за повърхността, атмосферата и други характеристики на местоназначението си. Нейният сензорен пакет може да включва оптични и термични камери, спектрометри и радар, проникващ в земята. Тези инструменти ще събират информация за областите, които софтуерът на орбитата разпознава като възможни интересни цели, като се имат предвид общите цели на научната мисия.
"Орбитърът може да разположи въздушно-десантните агенти за по-отблизо", каза Финк. „Орбитърът може също така да командва въздушните агенти безопасно да разположат наземните агенти до основните цели. Въздушните агенти помагат да се открият и потвърдят основните цели. "
"Наземните агенти могат да измерват информация като топлина или влага", каза Дом. „Или могат да вземат проби или да събират различни скали, а в случая на Марс - вода в близост до повърхността. Може да има много леки, разходващи се сензори, така че дори да сте загубили няколко, все още ще имате мисия. "
Сензорите изпращат информация обратно в съответните въздушни сонди и в крайна сметка до орбиталния космически кораб. Въз основа на тази нова информация орбитателят изпраща нови команди, които управляват мисията.
„Космическите, въздушните и наземните агенти работят заедно като полеви геолог“, каза Дом. „Те анализират информация, за да формират работеща хипотеза.“ Те биха били идеални за проучване на Валес Маринерис, разширената каньонна система на Марс или предполагаемия лед океан в Европа, добави той.
В случая с Valles Marineris, например, каза Дом, орбитиращият космически кораб ще разполага с датчици, които ще предават метеорологичните условия обратно на космическия кораб. Ако сензорите дават на космическия кораб отчет за доброто време - например няма силни ветрове - космическият кораб ще изпусне балоните или неравностите. Тези военновъздушни агенти ще започнат търсенето на цели, важни за целите на мисията, събиране и добавяне на нова информация, докато те отиват и разполагат наземни агенти в обещаващи кандидат-сайтове. Наземните агенти биха събирали и връщали данни на въздушните сонди на по-високо ниво, или в орбитата, или и двете. „Ако целта на Valles Marineris беше да се намерят евентуални водни пробиви или вода в близост до повърхността, сондаж може дори да бъде разположен на най-обещаващото място“, каза Дом.
Fink и Dohm казват, че новата концепция се нуждае от по-нататъшно проектиране, тестване и заточване на земята в различни земни среди. Те предвиждат полеви лагери за международни изследователи за проектиране и тестване на възможни степенно скалируеми разузнавателни системи.
Интелигентните, управлявани от науката роботизирани космически мисии са десетилетие или две в бъдеще, те ще бъдат международни и ще имат значително корпоративно и частно спонсорство, прогнозират Dohm и Fink.
Оригинален източник: Университет в Аризона