Наскоро НАСА Лаборатория за реактивни двигатели обяви, че разработва малък безпилотен хеликоптер, който да открие пътя на бъдещите марсоходи. Защо марсоходците се нуждаят от такъв роботизиран водач? Отговорът е, че шофирането на Марс наистина е трудно.
Тук, на Земята, роботите, които изследват вулканични джанти или помагащи спасители, могат да бъдат управлявани с дистанционно управление, с джойстик. Това е така, защото радиосигналите достигат до робота почти от момента на контролния му център. Шофирането на Луната не е много по-трудно. Радиосигналите, пътуващи със скоростта на светлината, отнемат около две и половина секунди, за да направят обратното пътуване до Луната и обратно. Това забавяне не е достатъчно дълго, за да може сериозно да пречи на шофирането с дистанционно управление. През 70-те години на миналия век съветските контролери задвижваха лунните гребци на Луноход по този начин, успешно проучвайки повече от 40 км лунен терен.
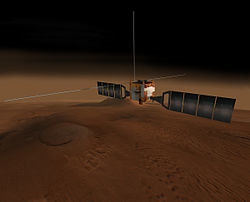
Карането на Марс е много по-трудно, защото е толкова далеч. В зависимост от положението му по отношение на Земята, сигналите могат да отнемат между 8 и 42 минути за обратно пътуване. Предварително програмираните инструкции трябва да бъдат изпратени на роувъра, който той след това изпълнява самостоятелно. Всяко марсианско шофиране отнема часове внимателно планиране. Стерео изображенията, направени от навигационните камери на роувъра, внимателно се проверяват от инженерите. Изображенията от космически кораби в орбита на Марс понякога предоставят допълнителна информация.
Роувърът може да бъде програмиран или просто да изпълни списък от команди за управление, изпратени от Земята, или може да използва изображения, направени от навигационните му камери и обработени от бордовите му компютри, за да измерва скоростта и да открива препятствия или опасности от себе си. Той дори може да начертае свой собствен безопасен път към определена цел. Задвижванията въз основа на инструкции от земята са най-бързи.
Духът и възможностите за проучване на Марс можеха да изминат до 124 метра за час по този начин. Това съответства на дължината на американското футболно игрище. Но този режим беше и най-малко безопасен.
Когато роувърът активно се ориентира със своите камери, напредъкът е по-безопасен, но много по-бавен поради цялата необходима обработка на изображението. Той може да прогресира с едва 10 метра на час, което е приблизително разстоянието от линията на гол до линията 10 ярда на американско футболно игрище. Този метод трябва да се използва винаги, когато роувърът няма ясен изглед на маршрута напред, което често се случва поради груб и хълмист терен.
В началото на 2015 г. най-отдалеченият Curiosity е карал за един ден е 144 метра. Най-дългото ежедневно шофиране на Opportunity беше 224 метра, разстояние от дължината на две игрища за американски футбол.
Ако наземните контролери могат да получат по-добър поглед върху пътя напред, те биха могли да разработят инструкции, позволяващи на бъдещ роувър безопасно да кара много по-далеч за един ден.
Оттук идва идеята за безпилотен вертолет. Хеликоптерът може да излита пред ровера всеки ден. Изображенията, направени от въздушната му гледна точка, биха били безценни за наземните контролери за идентифициране на точки от научен интерес и планиране на маршрути за шофиране, за да се стигне до там.
Летенето на хеликоптер на Марс представлява специални предизвикателства. Едно предимство е, че марсианската гравитация е само 38% по-силна от тази на Земята, така че хеликоптерът не би трябвало да генерира толкова повдигане, колкото една и съща маса на Земята. Лопатките на витлата на хеликоптера генерират повдигане чрез избутване на въздуха надолу. Това е по-трудно да се направи на Марс, отколкото на Земята, защото марсианската атмосфера е сто пъти по-тънка. За да измести достатъчно въздух, лопатките на витлото трябва да се въртят много бързо или да са много големи.
Вертолетът трябва да може да лети самостоятелно, като използва предварителни инструкции, поддържа стабилен полет по предварително определен маршрут. Той трябва да кацне и да излита многократно в скалист марсиански терен. И накрая, тя трябва да е в състояние да оцелее в тежките условия на Марс, където температурата пада до 100 градуса по Фаренхайт или по-ниска всяка вечер.
Инженерите на JPL са проектирали коптер с маса 1 килограм; малка част от масата от 900 кг на Rover Curiosity. Лопатките на витлото му се простират на 1,1 метра от върха на острието до върха на острието и могат да се въртят при 3400 въртели в минута. Тялото е с размерите на кутия за тъкан.
Коптерът се захранва от слънчева енергия, като диск от слънчеви клетки всеки ден събира достатъчно енергия за захранване на полет от две до три минути и за отопление на превозното средство през нощта. Той може да прелети около половин километър през това време, като събира изображения за предаване към наземния контрол, докато върви. Инженерите очакват, че разузнаването, което събира дроновият коптер, ще бъде безценно при планирането на задвижвания на роувър, утроявайки разстоянието, което може да бъде изминато за един ден.
Референции и допълнително четене:
Благодаря на Марк Меймоне от лабораторията за реактивни двигатели на НАСА за информация за дневните разстояния на шофиране на Любопитство и Възможност.
J.J. Biesiadecki, P. C. Leger и M. W. Maimone (2007), „компромиси между насочено и автономно шофиране на Марсовете за проучване на Марс“, International Journal of Robotics Research, 26 (1), 91-104
Е. Хоуъл, Възможност Марсоходът Марс минава на 41 километра към „Маратонската долина“, сп. „Спейс“, декември 2014 г.
T. Reyes, Невероятно пътешествие, марсоходът Curiosity достига базата на връх Шарп. Списание „Космос“, септември 2014 г.
Хеликоптер може да бъде „разузнавач“ за марсоходци. Прессъобщение на НАСА за реактивни двигатели. 22 януари 2015 г.
Луд инженеринг: вертолетът на Марс. Видео от лабораторията за реактивни двигатели на НАСА.
Любопитство - Научна лаборатория на Марс, НАСА.
Марс - бъдещи планове за роувър. НАСА